
Detecting obstacles using an ultrasonic sensor HC-SR04
HC-SR04: a cheap ultrasonic sensor
Description

HC-SR04 is a commonly used ultrasonic sensor which is capable to detect obstacles in a range of 2-300cm. The sensor looks like a small PCB having two metal cylinders on the front-side and a small circuit on the back-side (see Fig.1).
Documentation
In this article we will provide a simple demo to use HC-SR04. This requires a preliminary read of the sensor user manual:
HC-SR04 User Manual
Pinmap description
The sensor has 4 PIN:
- VCC, which must be connected to 5V;
- Trig, which is an input PIN to trigger the measurement;
- Echo, which is an output PIN which sent out a square wave;
- GND, which must be connected to ground.
Note that user manual specifies which GND must be connected first since a floating 5V could permanently damage the sensor.
How it works
The two cylinders are actually an ultrasonic receiver (R) and an ultrasonic transmitter (T) which are driven by the circuitry. The working principle is quite simple: when triggered the transmitter shoots some pulses. When sound encounters an obstacle it is echoed back and detected by the receiver.
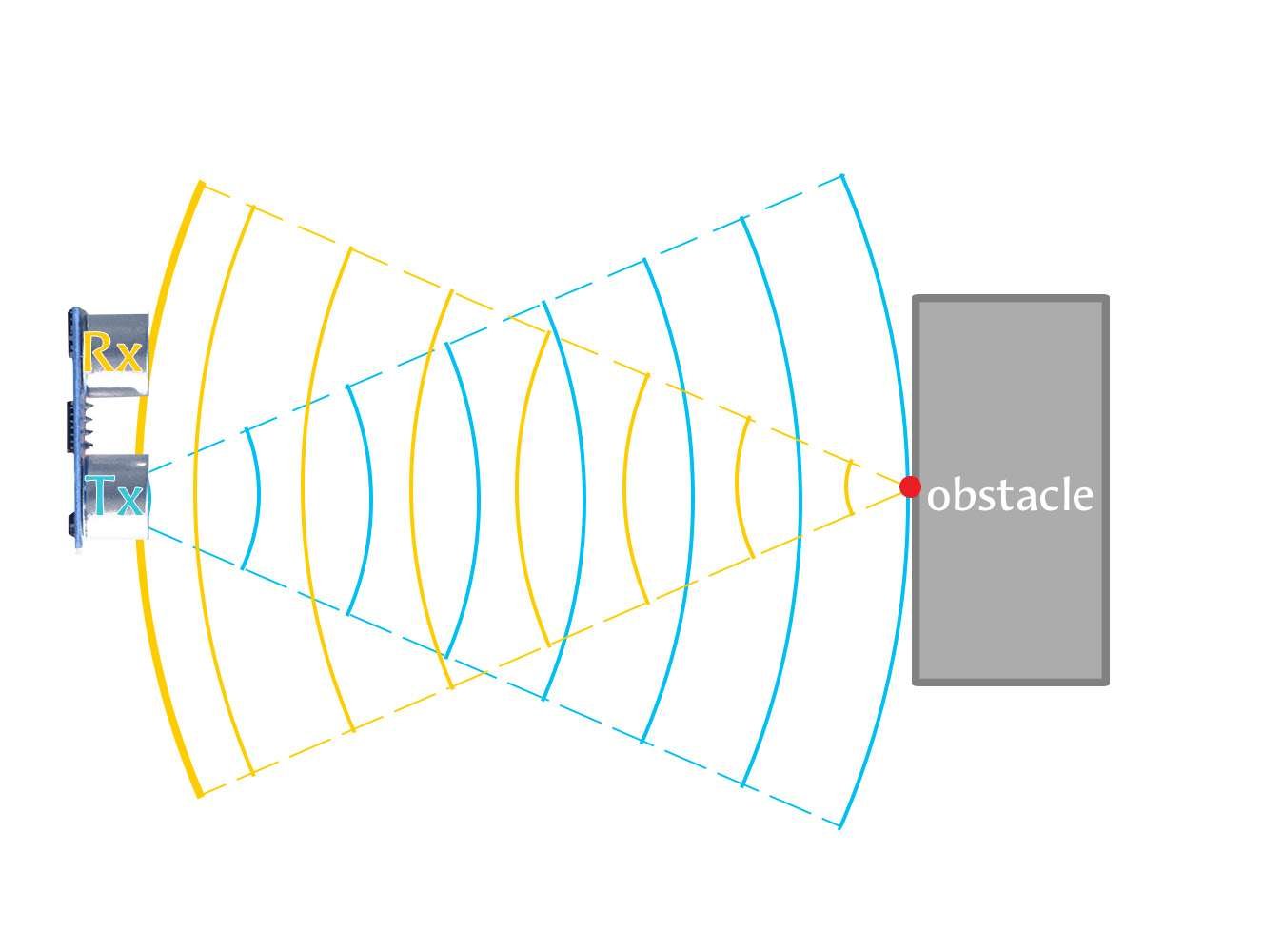
Since the speed of sound is almost constant, the information about the distance is strictly related the elapsed time from the shoot to the receiving. Indeed, sound has to travel twice the distance (roundtrip). Known the elapsed time the distance to obstacle is

where
- d is distance between the obstacle and the sensor
- v is the speed of sound (about 340 m/s)
- t is time elapsed
Note that, here we are not discussing about accuracy of the measurement which is affected from from different factors:
- speed of sound is not constant: it depends on material medium, temperature, pressure and humidity.
- time measurement accuracy: the measure is made by on board circuit and we don’t have control on this.
- the obstacle may not have a flat surface and there could be multiple diffraction or spurious echo.
How to use it
If Trig is set as high for at least 10us the sensor will shoot 8 pulses of sound. For the the whole time required by the sound to made the road trip Echo will be high.
The logical steps to get a measure would be:
- Set the Input Capture Unit to measure the high period of a square wave on the Echo pin;
- Pull up Trig signal for at least 10 us;
- Convert the measured time in a distance using the previous formula.
A simple demo
In this first demo we will use a STM32 Nucleo-64 F401RE and ChibiOS in order to detect an obstacle and print the distance to it on the ST-Link virtual COM port. To do this we will use chprintf() already explained in Hello ChibiOS and the ICU driver already used with DHT11 and IR Remote.
Connections
The PINs are connected as follow:
- VCC, to 5V;
- Trig, to PB10;
- Echo, to PA8;
- GND, to ground.
Demo explained
Taking a look to main.c we can see how this demo works. After few initializations the code starts to capture square waves on PA8.
#define ICU_TIM_FREQ 1000000
#define M_TO_CM 100.0f
#define SPEED_OF_SOUND 343.2f
static float lastdistance = 0.0;
static void icuwidthcb(ICUDriver *icup) {
icucnt_t width = icuGetWidthX(icup);
lastdistance = (SPEED_OF_SOUND * width * M_TO_CM) / (ICU_TIM_FREQ * 2);
}
static ICUConfig icucfg = {
ICU_INPUT_ACTIVE_HIGH,
ICU_TIM_FREQ, /* 1MHz ICU clock frequency. */
icuwidthcb,
NULL,
NULL,
ICU_CHANNEL_1,
0
};
As said, the information in encapsulated in the width of the squarewave: computing the previous explained formula it is possible to get distance starting from width. The distance will be stored in a variable which is used by main.
while (true) {
/* Triggering */
palWriteLine(LINE_TRIGGER, PAL_HIGH);
chThdSleepMicroseconds(10);
palWriteLine(LINE_TRIGGER, PAL_LOW);
#if ANSI_ESCAPE_CODE_ALLOWED
chprintf(chp, "\033[2J\033[1;1H");
#endif
chprintf(chp, "Distance: %.2f cm\n\r", lastdistance);
chThdSleepMilliseconds(100);
}
The main loop triggers the measurement providing a rising-edge on Trig and prints the last measure on the STLink Virtual COM port.
HC-SR04 and HD44780: mixing two demos
In the article How to drive a HD44780 with I2C backpack with a STM32 we have shown how to use an LCD 16×2 based on HD44780 provided of an I2C backpack. It is possible to create a more interesting demo including the LCD library in order to print the distance on the display instead of the Virtual COM port.
Connections
The PINs are connected as follow:
- VCC (HC-SR04) and VCC (HD44780), to 5V;
- GND (HC-SR04) and GND (HD44780), to Ground;
- Trig (HC-SR04), to PB10;
- Echo (HC-SR04), to PA8;
- SDA (HD44780), to PB9;
- SCL (HD44780), to PB8.
Demo explained
Lets take a look to the main loop
lcdStart(&LCDD1, &lcdcfg);
lcdWriteString(&LCDD1, "Distance", 0);
while (true) {
/* Triggering */
palWriteLine(LINE_TRIGGER, PAL_HIGH);
chThdSleepMicroseconds(10);
palWriteLine(LINE_TRIGGER, PAL_LOW);
chsnprintf(string, sizeof(string), "%.2f cm ", lastdistance);
lcdWriteString(&LCDD1, string, 40);
chThdSleepMilliseconds(200);
}
We can note few things:
- chprintf() is replaced by a lcdWriteString();
- first line is printed only once before the loop since it doesn’t changes;
- chsnprintf() is a custom implementation of snprintf();
- printing the last distance we add some spaces to avoid misprints when the string size decrease.
Project download
The project can be found directly in ChibiStudio under the workspace PLAY Embedded with the name “RT-STM32F401RE-NUCLEO64-HC-SR04+HD44780-PCF8574“.
Replies to Detecting obstacles using an ultrasonic sensor HC-SR04